



Q10儿童假人
Q系列假人是即P系列假人之后推出的儿童系列假人,相比P系列假人Q系列假人的生物力学特性有所改善,并基于儿童和按比例缩小的成人生物力学信息响应曲线定义假人响应,假人可以配备加速度传感器,角速度传感器,测力传感器、位移传感器等,来评估在各种情况下受到的伤害。
为了使假人易安装,拆卸,我们在假人结构上进行了优化,以确保件人能被快速拆卸和组装,且保证传感器对假人运动特性影响的最小化,保护假人内的传感器和电缆的完好。
结构:
头部--头部主要由聚氨酯合成材料制成。在头颅内可以安装线性加速度传感器和角速度传感器。
颈部--柔性颈部允许在所有方向上的剪切和拉伸。分段设计可以防止翘曲,并允许适当的旋转。颈部中心装有钢丝绳,可以防止高负载下失效。六通道力传感器可以安装在颈部-头部和颈部-胸部连接界面。
胸部--儿.童胸部由聚氨酯骨架及皮肤组成。胸部变形可以由位于助骨上部区域和下部区域的两个IR-TRACC 2D传感器测量,肩部通过柔性接头连接到胸部,并目肩部可以产生形变。加速度传感器可以安装在胸椎和肋骨架上,用于测量线性加速度。此外,胸椎有利于角速度传感器和倾角传感器的使用。 除此之外,可以安装侧面碰撞肩部套件。
腹部--腹部是用PVC皮肤覆盖并由泡沫填充。腹部刚度由儿童的生物力学数据确定。
腰椎--腰椎是一柔性橡胶柱,腰椎可以在所有方向上受剪切力和弯曲力。六通道力传感器安装在腰椎和盆骨之间。
骨盆--Q10假人盆骨设计与其它Q系列假人盆骨有区别,其设计类似于WorldSID假人,它具有适合单通道耻骨力传感器和两个骶骨力传感器可选。因此,盆骨内塑料骨骼和柔性橡胶耻骨可以为侧面碰撞提供更多可编辑的设计。还为传感器预留了安装的空间。加速度传感器,角速度传感器和倾角传感器可以安装在该空间中。 在H点施加一摩擦力用于髋关节的定位。
手臂--肘关节和肩部之间的摩擦力可以调节到1g,侧面碰撞肩部装备了一个柔性上臂,没有下臂。
腿部--可以安装六轴股骨力传感器。膝关节的摩擦力可以调整到1g,两侧小腿相同。
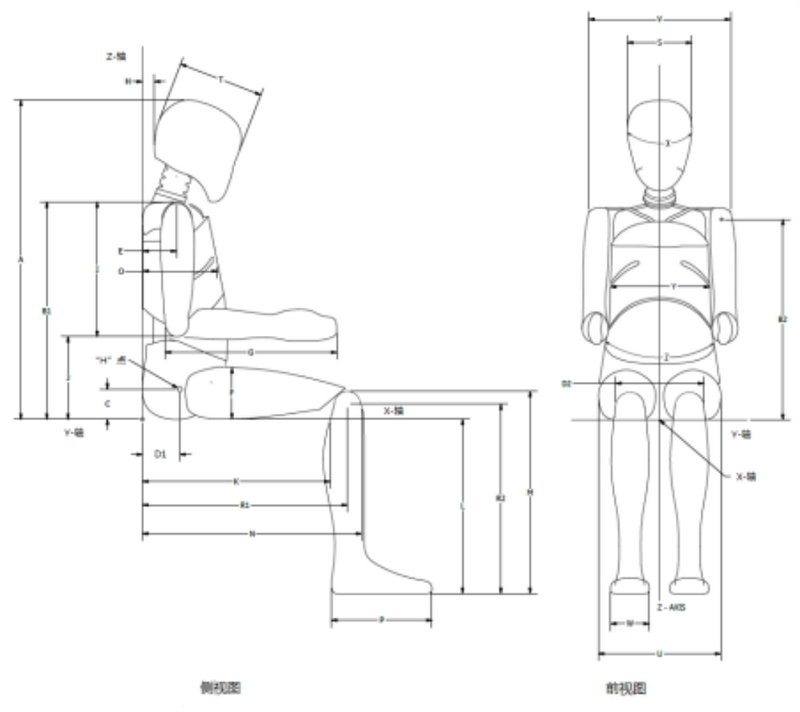
主要尺寸:
| 序号 | 名称 | 尺寸(mm) |
| A | 坐高总高(头部前倾22º) | 738.7±9 |
| B1 | 肩高(手臂顶部) | 472.6±7 |
| B2 | 肩托枢轴高度 | 443.8±6 |
| C | 髋关节枢轴高度 | 65.9±3 |
| D1 | 髋关节枢轴背线 | 90.4±3 |
| D2 | 髋关节距离 | 132.0±3 |
| E | 肩托枢轴背线 | 75.4±6 |
| F | 大腿高度 | 114.0±3 |
| G | 下臂和手长 | 376.2±6 |
| H | 头部后部的背线 | 37.6±3 |
| I | 肩肘长度 | 291.6±3 |
| J | 肘关节高度 | 181.0±9 |
| K | 臀部到膝后窝的距离 | 414.9±6 |
| L | 膝后窝的高度 | 405.7±6 |
| M | 地板到膝盖顶部 | 451.0±6 |
| N | 臀部到膝距离 | 485.4±6 |
| O | 在乳头处的胸部深度 | 171.0±5 |
| P | 脚长 | 190.0±3 |
| Q1 | 立高(头部向前倾22º) | 1457.9±12 |
| R1 | 臀部到膝盖枢轴距离 | 448.4±6 |
| R2 | 地板到膝盖枢轴 | 422.0±6 |
| S | 头部宽度 | 144.0±3 |
| T | 头部深度 | 186.5±3 |
| U | 髋宽 | 270.0±7 |
| V | 肩宽 | 334.8±7 |
| W | 脚宽 | 82.0±3 |
| X | 头围 | 534.0±6 |
| Y | 在乳头高度处的胸围 | 623.6±6 |
| Z | 腰围(目标:实际直立的坐姿) | 664.6±6 |
质量分布:
| 组件 | 质量(kg) |
| 头部和上颈部 | 3.695±0.10 |
| 颈部和交界面 | 0.515±0.05 |
| 胸部、颈部肩部罩、下颈 | 5.88±0.20 |
| 骨盆、腹部和腰椎 | 8.40±0.30 |
| 上臂(单个) | 1.09±0.05 |
| 下臂和手(单个) | 0.90±0.05 |
| 大腿(单个) | 3.71±0.10 |
| 小腿和脚(单个) | 2.53±0.12 |
| 套子 | 0.63±0.10 |
| 总计 | 35.58±1.39 |
传感器配置:
| 安装位置 | 传感器名称 | 通道 | 配置要求 |
| 头部 | 加速度传感器 | 3×1 | ★★★ |
| 头部 | 角速度传感器 | 3×1 | |
| 头部 | IES倾角传感器 | 1 | |
| 上颈部 | 6通道力传感器 | 1×6 | ★★★ |
| 下颈部 | 6通道力传感器 | 1×6 | ★★ |
| 下颈部接口板T1 | 加速度传感器 | 2×1 | |
| 肩部 | 加速度传感器 | 2×1 | |
| 肩部 | 三分量力传感器 | 2×3 | |
| 胸部 | 2D IR-TRACC | 2×2 | ★★★ |
| 胸部 | 2D IR-TRACC | 2×1 | |
| 胸部T4 | 加速度传感器 | 3×1 | ★★★ |
| 胸部T4 | 角速度传感器 | 3×1 | |
| 胸部和肋骨架 | 加速度传感器 | 5×1 | |
| 胸腔 | IES倾角传感器 | 1 | |
| 腹部 | 压力传感器 | 2×1 | ★★★ |
| 腰椎 | 六分量腰脊柱力传感器 | 1×6 | ★★ |
| 腰椎顶部 | 加速度传感器 | 2×1 | |
| 腰椎顶部 | 角速度传感器 | 2×1 | |
| 盆骨 | IES倾角传感器 | 1 | |
| 盆骨(骶骨) | 加速度传感器 | 3×1 | ★★ |
| 盆骨(骶骨) | 角速度传感器 | 3×1 | |
| 盆骨 | 分量耻骨力传感器 | 2×1 | ★★ |
| 盆骨 | 分量耻骨力传感器 | 2×2 | ★★ |
| 大腿 | 六分量股骨力传感器 | 2×6 |
赛孚公司对产品的售后服务承诺如下:
1、我司保证制造过程中所有工艺、关键零部件等各方面达到规定的品质、规格和性能,提供的产品是全新的、采用最新设计和合适材料制造的、符合国内和国际法规及标准。
2、自产品售出之日起,质保1年,且为客户提供假人重铸、维修等相关服务。
3、免费提供用户开展汽车安全假人碰撞试验所需的培训和指导,保证用户相关试验人员掌握假人的正确使用方法和试验数据的正确分析。
4、若由于产品质量问题引起用户试验工作遇到阻碍,售后人员7×24小时全天候电话沟通处理,48小时内到达现场进行处理。
5、我司长期为客户提供备件采购和供应服务。
6、售后服务热线:0731-84488719
Q假人适合正碰和侧面碰撞的CRS评估,也适用于客户评价和研究的双重目的。其中可能的应用包括:
— UN R129儿童约束系统(CRS)测试
— EuroNCAP测试
— C-NCAP测试
— Latin-NCAP测试
— K-NCAP测试
— ASEAN-NCAP测试
— ANCAP测试
Q系列假人是继P系列假人后推出的儿童系列假人。相比P系列假人,Q系列假人的生物力学特性有所改善,是基于儿童和按比例缩小的成人生物力学信息响应曲线定义的假人响应。该系列假人可以配备加速度传感器、角速度传感器、测力传感器、位移传感器等,评估假人在各种情况下受到的损伤。
为了使儿童假人易安装、易拆卸,赛孚公司在假人结构上进行了优化,以确保假人能被快速拆卸和组装,而且保证了传感器对假人运动特性影响的最小化,保护假人体内的传感器和线缆的完好。


 复制产品链接
复制产品链接
 长按图片保存/分享
长按图片保存/分享
询盘


询盘
首页 | 产品服务 | 碰撞测试实验室系统 | 服务支持 | 关于我们 | 新闻中心 | 联系我们 |
电 话:0731 - 8448-8719
地 址:湖南省长沙市岳麓区学士路602号
E-mail:server@hnsaf.com
Copyright © 2023 湖南赛孚汽车科技股份有限公司 湘ICP备19026141号-1

扫码关注我们
